Sixu Lin(林思序)
I am a first-year CS Ph.D. student at the School of Data Science, The Chinese University of Hong Kong, Shenzhen (CUHK-Shenzhen), advised by Prof. Guiliang Liu. I received my B.Eng. in Automation (ranking in the top 2%) from Harbin Institute of Technology, Shenzhen in 2025. I have also worked as a research intern at Shanghai AI Laboratory, mentored by Ming Zhou.
My work has been published in top-tier AI and robotics venues, such as ICML, ICLR, and ICRA. These projects span reinforcement learning, humanoid locomotion, and robotic manipulation.
My research focuses on building embodied agents that learn through interaction and exhibit robust behaviors in real-world environments. Specifically:
- Generalist Robotic Manipulation Model
- Reinforcement Learning for Dexterous Manipulation
- Whole-body Control for Humanoid Robots
Email / Github / Google Scholar / CV

News
Selected Publications

RoboFlow4D: A Lightweight Flow World Model Toward Real-Time Flow-Guided Robotic Manipulation
An end-to-end, goal-oriented 3D flow world model toward real-time flow-guided robotic manipulation.
DyGRO-VLA: Cross-Task Scaling of Vision Language Action Models via Dynamic Grouped Residual Optimization
A dynamic grouping residual reinforcement learning framework for Vision-Language Action models.
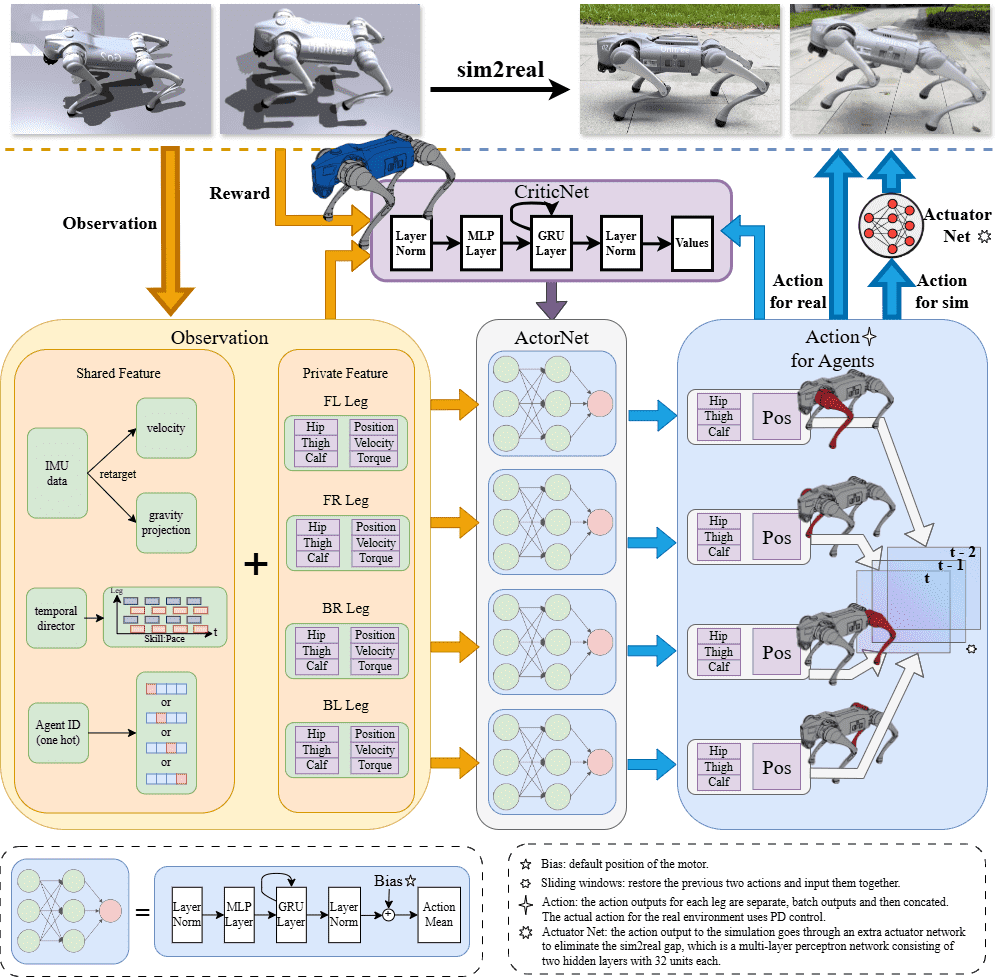
HWC-Loco: A Hierarchical Whole-Body Control Approach to Robust Humanoid Locomotion
A hierarchical whole-body control approach for robust humanoid locomotion across diverse terrains, robot structures, and disturbance settings.
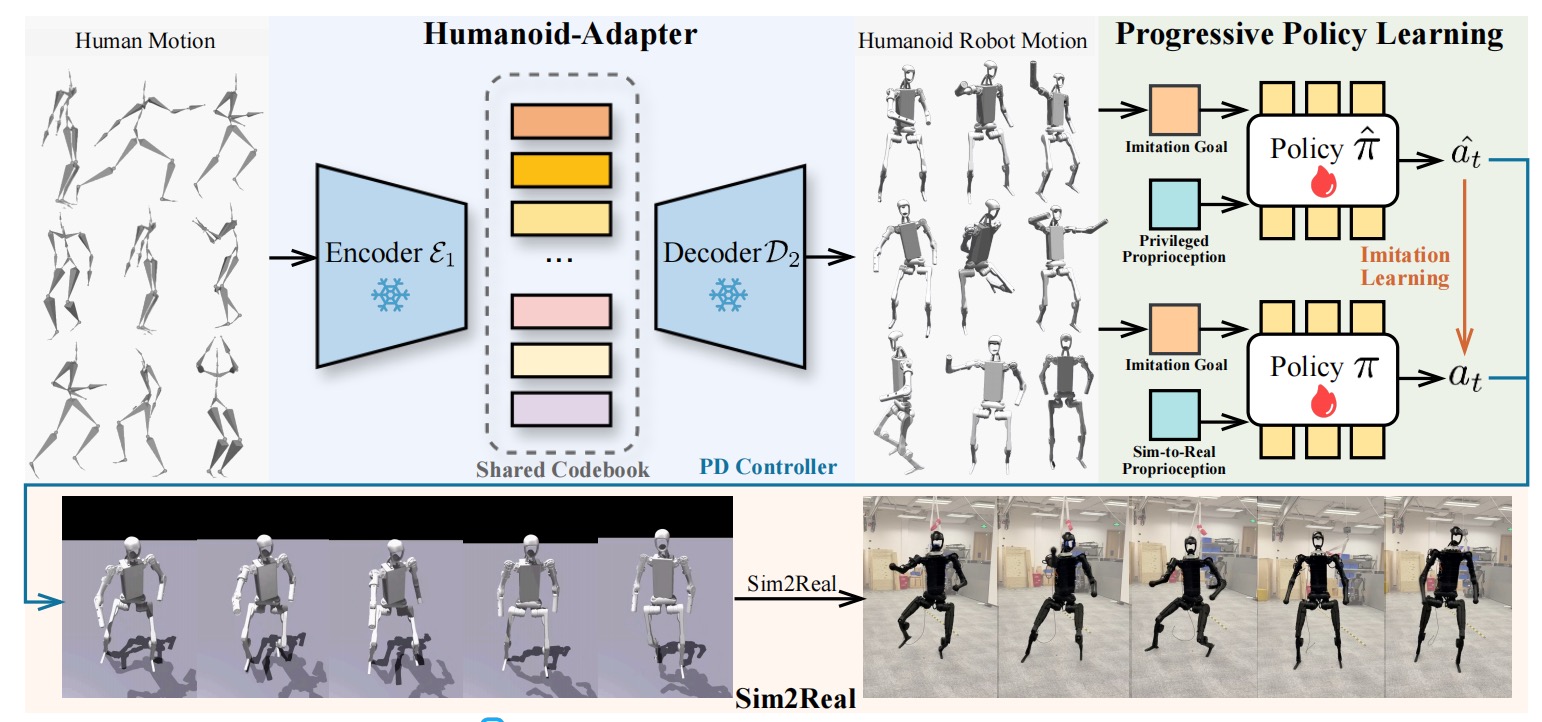
SignBot: Learning Human-to-Humanoid Sign Language Interaction
A human-to-humanoid sign language interaction framework spanning motion retargeting, motion control, and generative interaction.

BiTrajDiff: Bidirectional Trajectory Generation with Diffusion Models for Offline Reinforcement Learning
A bidirectional diffusion framework for offline reinforcement learning that models both future and history trajectories from intermediate states.
VLAC: A Vision-Language-Action-Critic Model for Robotic Real-World Reinforcement Learning
A vision-language-action-critic model that provides dense progress rewards and action generation for real-world robot reinforcement learning.
Experience

Research internship on embodied intelligence and robotics.
Worked on vision-language-action models and reinforcement fine-tuning.

Undergraduate research on air-ground coordination with quadruped robots and UAVs.
Remote research on autonomous vehicle navigation and planning.
Education
- 2025 - Present, Ph.D. in Computer Science, The Chinese University of Hong Kong, Shenzhen.
- Jul. 2024 - Sep. 2024, Visiting Student, Westlake University.
- Jul. 2023 - Sep. 2023, Visiting Student, University of Oxford.
- 2021 - 2025, B.Eng. in Automation, Harbin Institute of Technology, Shenzhen. Rank: 3 / 256 (top 2%).
Honors & Awards
- Dec. 2025: 🏆 Top 1.3% (ranked 6th of 463 teams) in the Tencent AI Arena Global Open Competition, Reinforcement Learning Embodied-AI Track (CNY 15,000).
- 2025-2029: 🏅 Yongping Duan Scholarship (CNY 15,000 per month).
- 2023-2024: 🏅 National Scholarship (top 0.2%; CNY 8,000).
- 2023-2024: 🏆 The 18th National University Students Intelligent Car Race, National Second Prize.
- 2022-2024: 🏅 First-Class Scholarship for Undergraduate Students (top 5%; CNY 12,000).
- 2021-2022: 🏅 Second-Class Scholarship for Undergraduate Students (CNY 4,000).
- 2021-2023: 🏅 Outstanding League Member.
- 2021-2023: 🏅 Outstanding Student.
Teaching
- Teaching Assistant, CSC-1004: Computational Laboratory Using Java.
Service
- Conference Reviewer: NeurIPS, ICML (Gold Reviewer), ICLR, ICRA, IROS.